复旦大学技术转移中心
fdzy@fudan.edu.cn
复旦大学江湾校区廖凯原法学楼 上海市淞沪路2005号
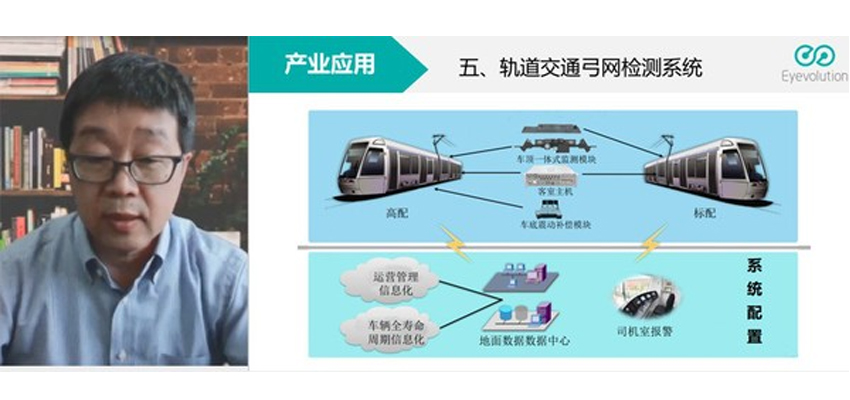
在仿生双目视觉系统中,中科院上海微系统与信息技术研究所研究员张晓林团队自主研发的自动监测及导航方案以仿生双目视觉传感器为主,IMU 等其他传感器为辅,可同时接入多种其他辅助传感器,与当前常见的激光导航方案相比,双目视觉方案具有部署时间短、定位精度高、避障功能全、视觉数据丰富、成本大幅减少等优势。目前该双目视觉传感器已经分别应用于上海地铁的弓网检测系统和半导体产线的自动晶圆搬运机器人。
 首页
首页 搜索
搜索