首页
首页 搜索
搜索




科技成果

复旦大学类脑智能科学与技术研究院
曾太平类脑智能机器人课题组介绍
曾太平,青年研究员,博士生导师。于中国科学院沈阳自动化研究所机器人学国家重点实验室获得博士学位,曾任日本东京大学特任研究员。长期致力于脑科学、智能与机器人学的交叉融合研究,旨在从空间导航、记忆、学习、决策、运动的角度,结合计算、机器人、神经和行为的方法,解析大脑空间认知的神经计算机制,构建具有人类空间智能水平的机器人系统。
在空间认知理论方面,提出了空间导航几何编码理论和全局一致空间编码理论;在类脑智能机器人方面,研发了面向大尺度场景的神经贝叶斯融合机器人导航算法。研究成果发表于国际权威期刊Progress in Neurobiology、Neural Networks、IEEE RA-L(ICRA/IROS)等,并获得多项机器人技术发明专利授权;入选国家、上海市海外高层次人才引进计划青年项目及复旦新工科人才计划,获日本学术振兴会(JSPS)、日本文部科学省(MEXT)的支持;研究成果得到了中国科学报、科学网、学习强国、中国科学院科研进展等媒体报道转发。
项目介绍:基于类脑智能的无边界视觉割草机器人系统
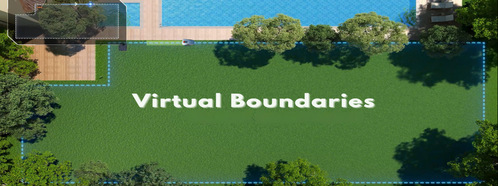
项目背景:传统家庭庭院割草方式效率低下、依赖人工及体验不佳,行业早期普遍采用的埋线式边界方案存在显著缺陷,不仅安装繁琐、破坏草坪美观,且灵活性差,难以适应复杂庭院布局。因此,基于视觉算法的割草机器人展现出巨大的发展潜力,无需预埋导线即可实现精准定位、智能避障与最优路径规划,从根本上解决了传统方案的痛点,为行业向更智能、更便捷、更普适的方向发展指明了道路,市场前景可观。
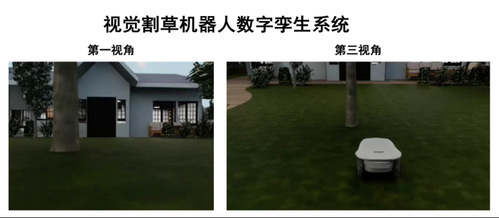
项目内容:系统全栈自主研发,采用RTK+视觉融合定位技术,解决了仅通过RTK定位信号不稳定的问题和纯激光视觉方案造价高昂的行业痛点,配合基于类脑人工智能的脑启发式导航技术进行路径规划,可准确地识别草坪的边界并进行工作。系统搭载高精度机器人数字孪生系统,能随意模拟自然界天气、光线以及周边环境,辅助快速验证算法,迭代算法。此外,系统还搭载远程控制APP,可为用户提供多样化的割草需求。
|
|
|
项目总结:综上所述,该系统采用RTK和视觉全融合定位技术,多个创新的技术应用为割草带来了更加安全、高效和多样化的可能性,整套方案100%自研,目前已进入小批量阶段,具备量产能力,具有合作转化需求,希望与相关单位或投资机构开展合作,开展产业化探索。
本项目有合作转化需求,希望与相关企业或投资机构合作,开展产业化探索。
邮箱:fdzy@fudan.edu.cn