 首页
首页 搜索
搜索




科技成果


课题组介绍 张鸿,复旦大学光电研究院研究员、博士生导师,光伏科学与技术全国重点实验室副主任。主要研究方向为空间光伏材料、器件及系统集成。迄今共发表SCI论文100余篇,其中以第一或者通迅作者在Nature Energy、Nat. Photonics、Nat. Commun.(7篇)、Sci. Adv.、Nat. Rev. Chem.、Nat. Rev. Mater.、Chem. Soc. Rev.、Adv. Mater.(4篇)、JACS、Energy Environ. Sci.(3篇)等知名期刊发表论文50余篇,10篇入选ESI高被引论文,2篇入选热点论文,撰写英文专著1章,研究成果他引10000余次,个人H指数52。 申请发明专利15项(含3项美国和欧洲专利),已授权5项。担任eScience、Nao-Micro Letters、Journal of Energy Chemistry、Information & Functional Materials、Energy Environmental Materials青年编委、Frontiers in Materials副主编以及
课题组简介 张成,复旦大学微纳电子器件与量子计算机研究院研究员、博士生导师。主要从事量子材料和器件研究,代表性工作包括发现基于外尔轨道的三维量子霍尔效应、高导电率拓扑表面态和开发声电探测技术等。在Nature、Nature Materials、PRL等重要学术期刊以通讯或第一作者发表多篇论文,研究工作获Science等学术期刊亮点报道。入选国家高层次人才计划青年拔尖人才、上海市东方英才计划领军项目、上海市教委曙光学者、上海市青年拔尖人才和上海市青年科技英才扬帆计划等人才项目,主持国家重点研发计划青年项目,上海市基础研究特区计划、基金委重大研究计划培育项目和面上项目等。 课题组主要开展对低维量子体系的物理机制和器件应用的研究,重点关注拓扑表面态、低维半导体等体系的电学性质、声电效应及相关器件研究。项目名称声电量子器件研究项目背景随着信息技术向高频、微型化和量子化发展,传统电学探测手段在微纳尺度和射频波段面临分辨率不足、侵入性强等瓶颈,尤其难以高效读取自旋激发、激子等电中性自由度。与此同时,以二维材料、量子点、拓扑表面态为代表的新型低维量子材料及其衍生的量子器件亟需非破坏性、高带宽的片

复旦大学信息科学与工程学院刘克富课题组介绍课题组负责人刘克富,信息科学与工程学院教授、博导,曾历任华中科技大学教授,英国Strathclyde大学访问学者,2006年引进复旦大学至今。现任中国核学会脉冲功率分委会常务理事、中国电源学会特种电源专委会常务理事。先后多次承担国家自然科学基金,在国内外权威刊物发表论文100余篇,授权和受理专利30余项。课题组团队教授1人,副教授2人,博士后1人,博士和硕士研究生12人,团队长期围绕脉冲功率、高功率电子学、电磁生物医学等方向开展研究。项目介绍:固态脉冲功率技术及相关应用项目背景:固态脉冲功率技术是一种把能量在一定时间宽度上进行压缩并瞬间高功率释放的电物理技术,本质是时域上精确控制能量输出的一种方式,在液体食品灭菌、能源控制、大科学装备以及国防科技领域具有广泛应用前景。项目内容:(1)激光雷达探测与成像技术本项目团队基于自适应门控调节的iToF动态探测技术和SoC架构的三维图像高速处理技术,研制开发了可远距离探测成像的高功率激光雷达,设备具备更宽的动态探测范围(~100m)、更高的信噪比及更低的功耗等性能优势,且激光雷达在智慧交通、三维测量以及实

课题组负责人孙允陆,复旦大学信息科学与工程学院青年研究员,聚焦激光微纳加工等激光应用技术,以第一或通讯作者发表Nature Communications(2篇),Light: Science Applications (封面),Advanced Materials (卷首),Angewandte Chemie International Edition (内封/highlighted/热点文章),Advanced Science (背封),Materials Horizons (内封)等顶尖SCI论文。课题组研究方向兼顾前沿性和应用性,包括①激光微纳加工新机制、新方法、新设备;②半导体和集成电路制造中的激光微纳加工;③激光医学和仿生光(子)学中的激光微纳加工;④微纳光子/电子器件辅助的图像化传感检测。项目名称:面向工业4.0时代的超快激光微纳加工技术项目背景:工业4.0时代的到来对材料性能的要求日益提升,特别是那些应用于极端环境下的难加工金属,如金属玻璃、高熵合金、高温合金等,它们因具有高强度、高硬度、耐腐蚀性等优异特性而被广泛青睐。然而,这些材料的复杂性也给加工制造带来了前所未有的

课题组负责人余建军,复旦大学信息科学与工程学院教授、博导,国家高层次人才、教育部长江特聘教授、国家杰出青年基金获得者、美国光学学会会士(OSA Fellow)、IEEE国际电子技术与信息科学工程师的学会会士(IEEE Fellow);获得中国光学工程学会科技进步一等奖、江苏省科技进步一等奖、教育部自然科学奖二等奖(三次)。在本领域高水平期刊上共发表1000余篇论文,连续4年入选思唯尔(Elsevier)“中国高被引学者”。团队长期从事高速光纤通信技术、毫米波通信和太赫兹通信技术等方面的研究,在大容量光通信和超高速太赫兹智能通信感知领域,屡创佳绩,创造多项传输速率和距离世界记录,以post-deadline paper(PDP)形式连续在国际光通信顶级会议OFC和ECOC上发表相关先进成果。项目介绍:开启6G时代:宽带太赫兹通信技术项目背景:随着6G时代引领全球通信技术的发展,太赫兹通信以其更高速、更大容量和更安全的数据传输的优势,成为关键技术之一。6G太赫兹通信的必要性不仅体现在提升科技竞争力、推动经济转型、满足社会需求、加强科研与人才培养等多个方面,也是响应国家高质量发展战略、实现科

课题组负责人徐敏,复旦大学信息科学与工程学院教授、博士生导师,专注于复杂曲面测量与评定、精密光学制造的加工检测一体化等领域,担任中国光学工程学会常务理事、中国工程物理研究院超精密制造重点实验室学术委员等任职,荣获教育部科技进步奖等奖项。课题组专注于复杂曲面、微纳结构等高性能光学元件的精密加工、检测与集成技术研究,攻克了光刻机方镜、双模整流罩、高陡度轮廓测量等一系列核心光学元件和装备的卡脖子关键技术,在Optics Letters、Light: Science and Applications、Optics Express、IJEM等国际期刊发表多篇论文。目前课题组有教职工13人,其中校聘兼职院士2人,研究生91人。项目介绍:高性能轮廓测量仪器:高陡度内轮廓光学测量仪项目背景:以整流罩为代表的高陡度曲面构件,被广泛应用于航空航天、高端装备、精密物理实验、船舶动力等尖端行业领域,其内表面轮廓的精准测量与表征是影响工件使用性能的关键因素。相关检测设备被国外限制进口,因此,设计、研制国产化、高性能、低成本的轮廓光学测量仪具有重要的科学价值和市场空间。项目内容:本项目团队基于科学仪器高性能制造理

秦亚杰,博士,复旦大学信息科学与工程学院微纳系统中心教授,长期从事模拟集成电路和电子系统设计研究,目前研究方向主要为高性能传感芯片与柔性混合电子系统。在IEEE IoTJ、IEEE TBioCAS、TIM、npj Flexible Electronics、Small等高水平学术期刊和国际会议上发表论文70多篇;主持多项国家自然科学基金面上项目、重点研发计划国际合作项目、重点研发计划智能机器人专项项目课题、上海市科技支撑课题等科研课题。获得授权发明专利10多项、上海市教学成果奖二等奖1次。智能传感芯片与系统课题组正式成立于2015年,以集成芯片研究为基础,融合新材料、柔性集成技术和智能算法,开展学科交叉研究,探索智能传感微系统及其在医疗和工业物联网领域的创新应用。团队秉持我校微电子学科洪志良教授倡导的“全链路”集成电路人才培养理念,注重实践与学术创新结合,强调“应用驱动的系统与芯片”创新范式,培养了大批“懂系统、精芯片”的优秀专业人才。课题组与本学院内生物医学工程中心、材料科学系、附属华山医院、代谢研究院等多学科保持紧密合作,承担了多项合作科研项目。同时,课题组的发展得到了大量校友、工业
复旦大学微电子学院陈时友研究员课题组简介课题组项目负责人陈时友,微电子学院研究员,2009年获复旦大学物理专业博士学位,2011年5月至2013年05月在劳伦斯-伯克利国家实验室从事博士后研究,曾入选国家级领军人才计划、国家自然科学基金优青、上海市优秀学术带头人。在Nature Comput. Sci., Nature Nanotech., Nature Energy, Phys. Rev. Lett., J. Am. Chem. Soc., Adv. Mater.等期刊发表论文150余篇,SCI引用14000余次,入选Elsevier中国高被引学者。主持国家自然科学基金重点项目、国家重点研发计划课题、上海集成电路研发中心探索者计划项目等20余项,曾获教育部自然科学一等奖、中国电子学会自然科学二等奖、中国材料研究学会计算材料学青年奖、上海市青年科技英才、第七届中国科协优秀科技论文奖;担任半导体学报、Computational Materials Sciences等期刊编委、国际半导体缺陷大会(ICDS)咨询委员会委员、2022年国际半导体物理大会(ICPS)程序委员会委员。课题组主要研
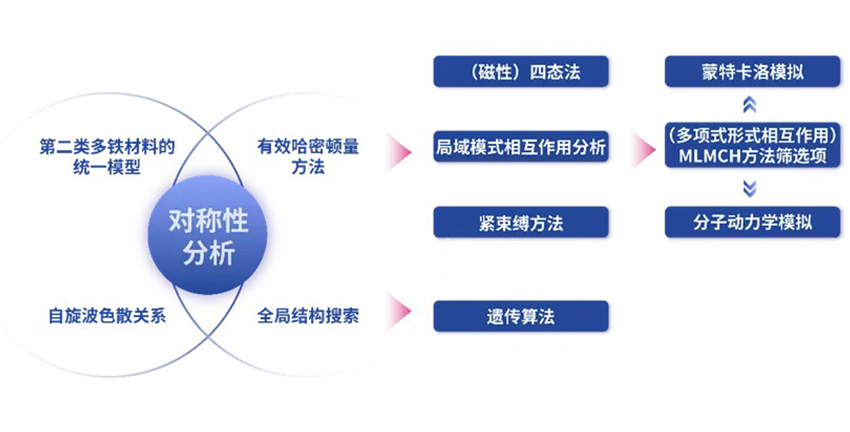
复旦大学物理学系向红军课题组简介课题组项目负责人向红军,复旦大学物理学系谢希德特聘教授。2001年,2006年分别获得中国科学技术大学学士和博士学位,2006年—2007年美国北卡州立大学博士后,2007年—2009年美国国家再生能源实验室博士后。2018年获“国家杰出青年基金”,2018年获国际理论物理中心“ICTP”奖,2021年入选美国物理学会会士,2023年获黄昆物理奖。课题组从事计算凝聚态物理研究,在多铁性物理模型建立和计算方法发展等方面取得了进展。代表成果有:提出了自旋序诱导铁电性的普适模型,突破了传统模型的局限,给出了一大类多铁的一般物理图像,已被领域专家广泛认可和采用。课题组建立了计算磁相互作用及磁电耦合强度的四态法,该方法已被至少18个国家的123个研究组采用。突破了最经典的固体物理教科书中“铁电材料一定具有极性点群对称性”的基本概念,提出了全新的分数量子铁电性。自主开发了通用的材料性质分析和模拟软件包(PASP),已被海内外多个研究组采购和采用。项目领域计算凝聚态物理,包括磁性、铁电性、多铁性、计算方法发展及程序开发、机器学习方法在计算凝聚态物理中的应用等。透视晶界
