 首页
首页 搜索
搜索




科技成果

课题组负责人陈欣荣,青年研究员,中华医学会数字医学专科分会委员、计算机学会数字医学分会执行委员、(国家)视觉与听觉健康产业技术创新联盟理事会理事、中国医疗器械行业协会视觉与听觉健康产业技术分会理事,上海医学会数字医学专科分会副主任委员。长期从事计算机辅助手术与手术机器人、脑机接口等关键技术研究,并实现多款产品的产业化。
主持国家级课题3项、省部级课题含重点课题4项,地区重点项目4项,横向课题及开放课题3项,参与国家重点科研项目3项。近5年,以第一作者/通讯作者发表国际期刊与顶级会议论文60余篇,申请发明专利20项,授权国际/国内发明专利8项,授权软件著作权12项,主编Springer等出版专著2部,参编1部,获中国国防工业企业管理创新成果二等奖等奖项。
项目介绍:智能导航手术机器人系统
项目背景:当前,机器人辅助手术行业正处在高速发展与深刻变革的时期,技术日趋成熟,应用场景多元化,市场竞争全球化,并朝着更高程度的智能化和远程化迈进。机器人定位精度高,稳定性强,并且不会出现疲劳抖动的现象。通过结合扩展现实等技术,可将重建的虚拟图像叠加于真实的手术场景中,帮助医生快速制订手术计划并准确定位,从而减少主观错误的发生。因此,导航手术机器人与扩展现实等技术的应用,已逐渐显现出直观准确的优势。
项目内容:本项目课题组自主设计了一套智能导航手术机器人系统,能够实现术中影像的场景感知,高效率、高精度实时动态手术导航,建立了多器械协同操控和远程操控策略、人-机协同的手术操作控制策略和风险规避方法。
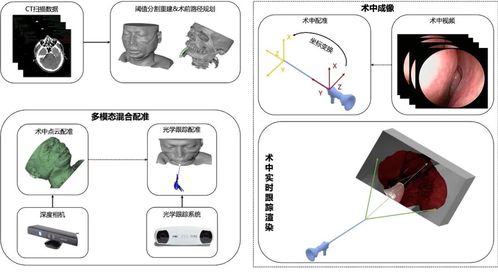
在配准方法上,本项目系统采用面配准技术,利用病人固有特征进行空间映射,不仅能直接基于现有影像进行导航、克服点配准的固有缺陷,还通过整合多维度信息实现了更高的配准精度。在软件算法上,利用深度学习技术进行模块化分割以实现自动规划,并结合增强现实技术来改善术野可视性,从而提升导航精度与手术安全性。在安全控制上,采用阻抗柔顺控制技术,将手术器械与患者组织的接触力限制在安全范围内,从而有效保护正常组织。在手术场景重建上,提出基于多尺度信息和低秩适应微调的深度图生成网络,并实现三维手术场景重建。核心硬件单孔多柔性手术机器臂,采用安全可靠的定位技术、高性能机械臂以及可避免关节角度限制的逆运动学控制策略,实现了高灵活度的机械臂控制。


项目总结:综上所述,本项目融合了未来智能手术机器人关键技术,包括智能交互与控制、多模态融合、智能规划、场景重建等,在空间配准、算法、控制、成本等方面均具有优势。目前已完成样机,导航系统已在临床上应用。
本项目有合作转化需求,希望与相关企业或投资机构合作,开展产业化探索。
