 首页
首页 搜索
搜索




科技成果


复旦大学工程与应用技术研究院仿生结构与机器人实验室,负责人为徐鉴教授和方虹斌研究员。实验室围绕“仿生结构与机器人”这一主题开展了系统的研究工作,近年在Advanced Materials, Physical Review Letters, IEEE Transactions等国际著名学术刊物上发表多篇原创性研究成果。
主要研究方向包括:具有超常规静力学、运动学和动力学性能的仿生结构和机器人开发;基于可变结构和多驱动器的仿生多模态、模块化机器人的协同;仿生移动机器人对可变工作环境的自适应与共融动力学;基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制。
╱ 研究领域 ╱
仿生结构与软体机器人、智能下肢假肢和柔性外骨骼
项目一:折纸艺术启发的仿蠕虫机器人
╱ 项目背景 ╱
随着科学技术的进步,人类对智能型移动机器人的要求越来越高。学习无腿动物的形态学特征和移动机理,研发仿生无腿移动机器人,是未来机器人发展的重要方向。然而,现有的无腿移动机器人一般通过体节的轴向变形实现直线运动,难以实现起竖等复杂功能。
╱ 项目内容╱
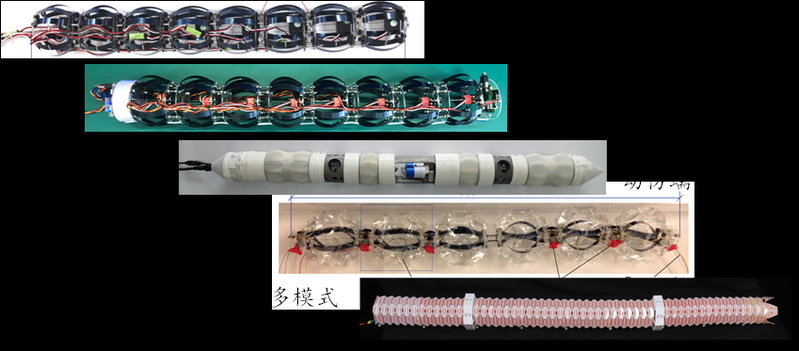
本项目是可适应复杂环境的、多类型模态的仿蠕虫机器人。课题组创新地将“折纸”思想引入机器人开发,将传统的“三维设计-三维加工-总装”的机器人制备流程革新为“二维折痕加工-折叠”,主导设计了“蠕动+游动”、“蠕动+摆动”、“蠕动+滚动”等多款仿蠕虫多模态移动机器人。
目前已在管道、水域和碎石地等复杂环境中模拟验证其功能,在起竖、转弯、爬升、断裂处通行等方面均具有良好的通过性能。本项目相关技术已申请中国发明专利(申请号CN202210185095.3等)。
╱ 项目总结 ╱
与现有仿蠕虫机器人技术相比,本项目的仿蠕虫机器人实现了机器人在轴向和径向上的变形,降低了制作工艺的复杂程度,增大了该机器人的运动空间,适应了陆地和水域等多种环境。该机器人有望应用于灾后救援、管道清理、水域搜索等任务。
希望与智能机器人相关研发、制造的企业单位合作,开展产业化探索。
项目二:协同驱动的智能下肢假肢
╱ 项目背景 ╱
相关数据显示,我国下肢截肢患者超过170万人,其中约3万人为高位截肢者。另据报道,我国糖尿病的发病率上升导致糖尿病晚期截肢人数增多,预计到2050年,截肢的人数将翻两番。然而,传统假肢只能辅助截肢患者完成基本行走,步态的不对称性和关节负荷增加常常导致跌倒、疼痛等伤害,严重降低截肢患者的活动能力和生活质量。
因此,如何提升假肢与健肢步态的协同性,成为智能假肢技术发展需要突破的难点。
╱ 项目内容 ╱

本项目研发的膝踝双驱动智能下肢假肢可为截肢者行走时提供膝关节和踝关节主动力,实现平地、爬坡、爬楼梯等多种路况的自然行走,恢复截肢患者尤其是大腿截肢患者主动行走能力。
该款智能假肢的技术亮点是融合足底力和关节运动的相位协同信息,从底层增强了截肢者行走的对称性;特别是踝关节采用丝杠-连杆传动机构,提升了小腿摆动的灵活性,降低了后期维护成本。课题组模拟截肢人群测试性能良好,相关产品及技术已申请中国发明专利(申请号CN202111108722.5等)。
在此基础上,课题组还研发了一款可配套假肢使用的智能测力跑台,通过“数据融合”技术实现了对下肢运动、压力中心、足底压力分布等信息的分析和优化,从而为提高康复训练效率、辅助运动员形态矫正奠定了技术基础。
╱ 项目总结 ╱
综上所述,本项目的智能穿戴假肢实现了多种环境下、融合足底步态、完全主动驱动地自然行走,成本低于国外同类产品,目前国内市场上暂无同类产品;配套的步态调整智能跑台提升了康复训练效果,性能优于同类产品。
希望与相关医疗器械研发、生产的企业单位合作,开展产业化探索。
以上发布内容未经授权,请勿转载!
